聖マリアンナ医科大学物理2013年第2問
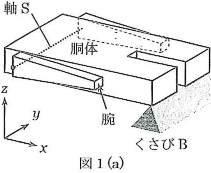
ヒトの腕の質量を計測する方法を考える。簡単のために図1(a)のような一部が欠けた直方体の胴体に、2本の角錐台の腕が接続されているヒト型剛体模型を考える。2本の腕はまったく同じものとする。腕は軸$\text{S}$を中心として$xz$平面上でのみ動かせる。図1(b)のように両腕を$x$軸に平行に固定し、模型が静止した状態でくさび$\text{B}$を支点として、くさび$\text{B}$と平行な辺$\text{A}$に作用する重力を計測すると、計測値は$w_b\times 9.8$[N]であった。模型全体の質量を$M$[kg]、腕1本の質量を$m$[kg]とし、図1(b)のように、胴体の長さを$L$[m]、腕の長さを$l$[m](ただし$l\lt L$)、辺$\text{A}$と軸$\text{S}$との距離を$r$[m]とする。重力加速度を$9.8$m/s2として以下の各問に答えなさい。ただし、〔1〕から〔4〕までは、腕の重心は、図1(b)の状態で軸$\text{S}$から$x$軸方向に$0.5l$の位置にあるとする。
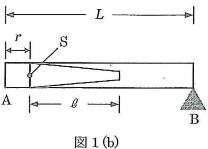
- 〔1〕図1(b)の状態で、くさび$\text{B}$に作用する重力の大きさを求めなさい。
- 〔2〕図1(b)の状態で、くさび$\text{B}$から模型全体の重心の位置までの$x$軸方向の距離を、与えられた変数を用いて表しなさい。
- 〔3〕くさび$\text{B}$から胴体の重心の位置までの$x$軸方向の距離を、与えられた変数を用いて表しなさい。
- 〔4〕腕1本の質量$m$を与えられた変数を用いて表しなさい。また、$w_b=30.2$kg、$w_c=31.1$kg、$M=65.0$kg、$L=1.65$m、$l=0.75$mとして、腕1本の質量を求めなさい。
- 〔5〕実際に腕1本の質量を計測したら$2.20$kgであった。図1(b)の状態で、腕の重心位置から軸$\text{S}$までの$x$軸方向の距離は$l$の何倍かを求めなさい。
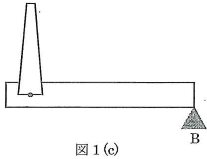
次に、図1(c)のように両腕を$z$軸に平行に固定した。模型が静止した状態で$\text{A}$に作用する重力を計測すると、計測値は$w_c\times 9.8$[N]であった。